January 5 2026
Color and Pattern Detection
Creating a automated way to enforce dress code.
Importance
The Issue
Managing and implementing a dress code at a school or a workplace is not always efficient or just. Studies show that a significant portion of dress code enforcement is not fair, targeting female students and racial minorities. By automizing part of this process bias will decrease and dress code violations will be detected quickly and proficiently.
Part 1
Motion Detection Setup
This code initializes a webcam feed and configures background subtraction, noise-cleanup kernels, and thresholds to detect and track motion and color in video frames.
Part 2
Bounding Box and Color Mask Functions
This code defines functions to detect and track colored objects by finding bounding boxes, checking overlaps, and creating cleaned color masks from video frames.
Part 3
HSV Color Range Definitions
This code defines the HSV value ranges for different colors to create masks for detecting red, yellow, green, blue, and pink objects.
Part 4
Real-Time Red Color Detection Loop
This code continuously captures webcam frames, detects motion, applies a red color mask, finds non-overlapping red objects, and stores them for drawing or tracking.
Part 5
Pink and Green Color Detection
This code detects pink and green objects in each frame, finds their bounding boxes, avoids overlaps with previously detected objects, and stores them for tracking or drawing.
Part 6
Blue and Yellow Color Detection
This code detects blue and yellow objects in each video frame, finds their bounding boxes, filters out overlaps with previously detected objects, and adds them to the list of detections for tracking or drawing.
Part 7
Drawing Detections and Alert System
This code draws rectangles and labels around all detected objects on the video frame, checks if any of the tracked colors (red, pink, green, or yellow) are present, prints a detection message if so, and sets an alert flag accordingly.
Part 8
Motion and Pattern Detection
This code detects moving objects in the webcam feed using background subtraction, isolates each moving region, converts it to grayscale, applies edge detection, counts significant structural patterns, labels the frame if enough patterns are found, draws bounding boxes around the moving objects, and prints alerts.
Part 9
Program Termination
This code displays the color and pattern detection video windows, waits for the user to press "q" to quit, clears the terminal, and then releases the webcam and closes all OpenCV windows to safely terminate the program.
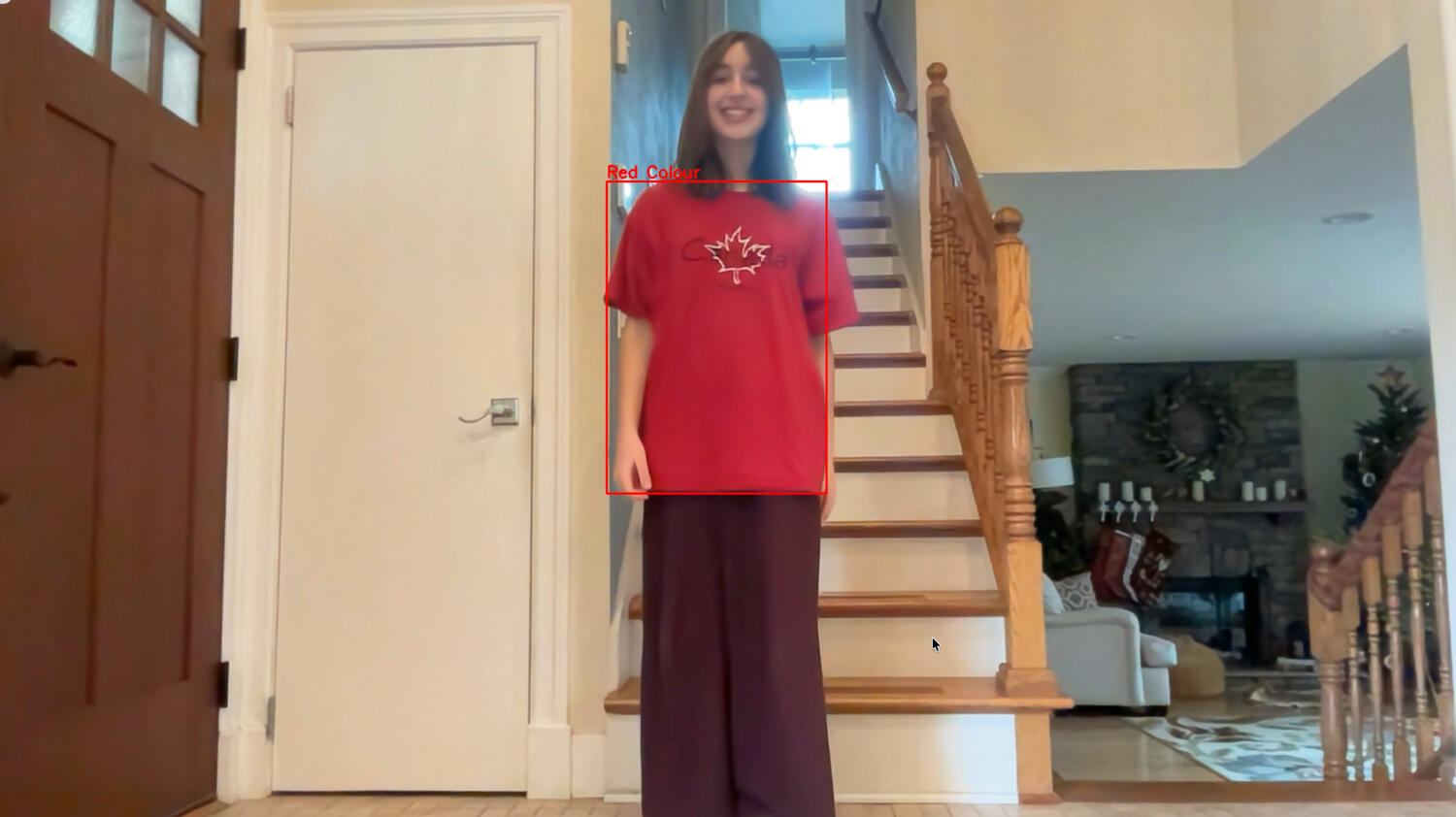
Example of Color Detection
*Terminal prints not shown
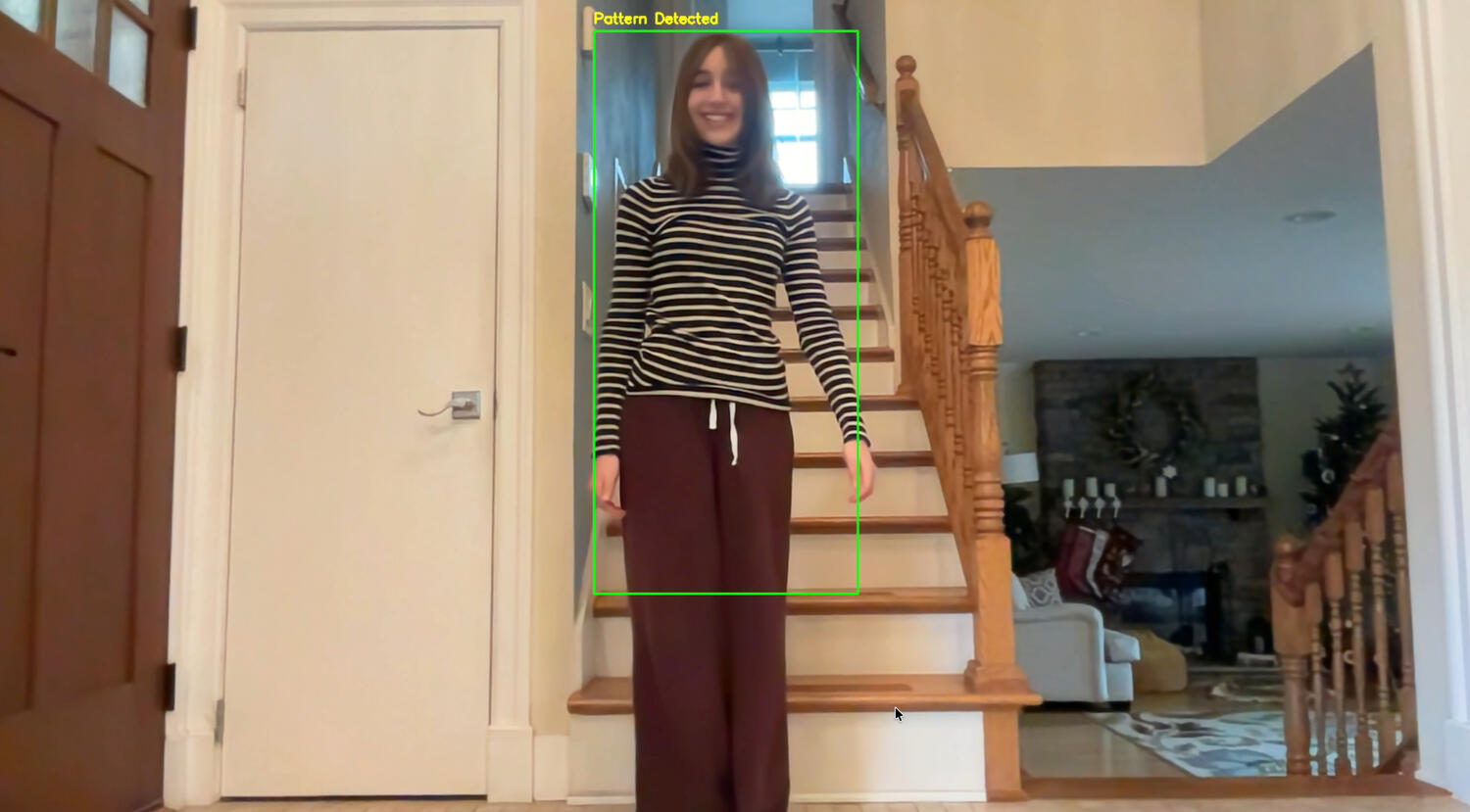
Example of Pattern detection
*Terminal prints not shown
Video
Program Demos & Explanations
Videos showing the program in its entirety.
33 seconds
Short Video
Explains basic workflow of the code.
1 minute 34 seconds
Longer Video
Explains the code more in depth.
1 minute 3 seconds
Demo Video
Shows the product of the code.
The Creator